Precision Servo DC Motor 46S/185-8A

លក្ខណៈពិសេសជាមូលដ្ឋាននៃម៉ូទ័រ servo DC: (ម៉ូដែលផ្សេងទៀត ដំណើរការអាចត្រូវបានប្ដូរតាមបំណង)
| 1. វ៉ុលដែលបានវាយតម្លៃ៖ | DC 7.4V | 5. ល្បឿនកំណត់: | ≥ 2600 rpm |
| 2. ជួរវ៉ុលប្រតិបត្តិការ៖ | DC 7.4V-13V | 6. ទប់ស្កាត់ចរន្ត៖ | ≤2.5A |
| 3. ថាមពលដែលបានវាយតម្លៃ៖ | 25W | 7. ផ្ទុកចរន្ត៖ | ≥1A |
| 4. ទិសបង្វិល: | អ័ក្សទិន្នផល CW គឺនៅខាងលើ | 8. ការបោសសំអាតអ័ក្ស: | ≤1.0mm |
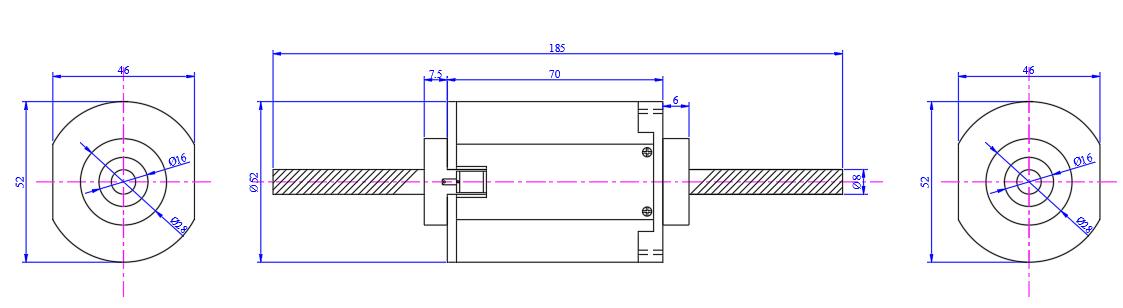
ដ្យាក្រាមរូបរាងផលិតផល
ពេលវេលាផុតកំណត់
ចាប់តាំងពីកាលបរិច្ឆេទនៃការផលិតរយៈពេលនៃការប្រើប្រាស់ប្រកបដោយសុវត្ថិភាពនៃផលិតផលគឺ 10 ឆ្នាំហើយពេលវេលាធ្វើការបន្តគឺ≥ 2000 ម៉ោង។
លក្ខណៈផលិតផល
1.បង្រួម, ការរចនាសន្សំសំចៃកន្លែង;
2. រចនាសម្ព័ន្ធទ្រនាប់;
3. អាយុកាលសេវាកម្មយូរនៃជក់;
4.External access to brushes អនុញ្ញាតឱ្យការជំនួសងាយស្រួលដើម្បីពង្រីកជីវិតម៉ូតូបន្ថែមទៀត;
5. កម្លាំងបង្វិលជុំចាប់ផ្តើមខ្ពស់;
6.Dynamic braking ដើម្បីបញ្ឈប់លឿនជាងមុន;
7. ការបង្វិលបញ្ច្រាស;
8. ការតភ្ជាប់ពីរខ្សែសាមញ្ញ;
9.Class F អ៊ីសូឡង់កំដៅ welding commutator ។
10. ការសម្តែងខ្ពស់ ការចំណាយខ្ពស់ និងការជ្រៀតជ្រែកទាប។
កម្មវិធី
វាត្រូវបានគេប្រើយ៉ាងទូលំទូលាយក្នុងវិស័យផ្ទះឆ្លាតវៃ ឧបករណ៍វេជ្ជសាស្ត្រច្បាស់លាស់ ដ្រាយរថយន្ត ផលិតផលអេឡិចត្រូនិក ម៉ាស្សា និងឧបករណ៍ថែទាំសុខភាព ឧបករណ៍ថែទាំផ្ទាល់ខ្លួន ការបញ្ជូនមនុស្សយន្តឆ្លាតវៃ ស្វ័យប្រវត្តិកម្មឧស្សាហកម្ម ឧបករណ៍មេកានិចស្វ័យប្រវត្តិ ផលិតផលឌីជីថល។ល។
ការបង្ហាញអំពីការអនុវត្ត



ប្រព័ន្ធ Servo៖ វាគឺជាប្រព័ន្ធគ្រប់គ្រងដោយស្វ័យប្រវត្តិដែលអនុញ្ញាតឱ្យទិន្នផលគ្រប់គ្រងបរិមាណដូចជាទីតាំង ការតំរង់ទិស និងស្ថានភាពរបស់វត្ថុដើម្បីធ្វើតាមការផ្លាស់ប្តូរណាមួយនៅក្នុងគោលដៅបញ្ចូល (ឬតម្លៃដែលបានផ្តល់ឱ្យ)។ ភារកិច្ចចម្បងរបស់ servo គឺពង្រីក បំប្លែង និងគ្រប់គ្រងថាមពលតាមតម្រូវការនៃពាក្យបញ្ជា ដើម្បីឱ្យកម្លាំងបង្វិលជុំ ល្បឿន និងទីតាំងទិន្នផលដោយឧបករណ៍ដ្រាយអាចត្រូវបានគ្រប់គ្រងយ៉ាងបត់បែន និងងាយស្រួល។
ដោយសារតែដំណើរការ "servo" របស់វាត្រូវបានគេហៅថា servo motor ។ មុខងាររបស់វាគឺដើម្បីបំប្លែងសញ្ញាត្រួតពិនិត្យវ៉ុលបញ្ចូលទៅក្នុងការផ្លាស់ប្តូរមុំទិន្នផល និងល្បឿនមុំនៅលើ shaft ដើម្បីជំរុញវត្ថុបញ្ជា។
គោលការណ៍នៃ DC Servo Motor
គោលការណ៍ការងាររបស់ DC servo motor គឺដូចគ្នាទៅនឹងម៉ូទ័រ DC ធម្មតាដែរ។ កម្លាំងបង្វិលម៉ាញេទិកត្រូវបានបង្កើតឡើងដោយសកម្មភាពនៃលំហូរខ្យល់ armature និងលំហូរម៉ាញេទិចគម្លាតខ្យល់ដើម្បីធ្វើឱ្យម៉ូទ័រ servo បង្វិល។ ជាធម្មតា វិធីសាស្រ្តគ្រប់គ្រង armature ត្រូវបានប្រើដើម្បីផ្លាស់ប្តូរល្បឿនដោយការផ្លាស់ប្តូរវ៉ុលខណៈពេលដែលរក្សាវ៉ុលរំភើបឱ្យថេរ។ តង់ស្យុងកាន់តែតូច ល្បឿនកាន់តែទាប ហើយនៅពេលដែលវ៉ុលគឺសូន្យ វាឈប់បង្វិល។ ដោយសារតែនៅពេលដែលវ៉ុលគឺសូន្យចរន្តក៏សូន្យដែរដូច្នេះម៉ូទ័រនឹងមិនបង្កើតកម្លាំងបង្វិលអេឡិចត្រូម៉ាញ៉េទិចទេហើយវាក៏មិនលេចឡើងនូវបាតុភូតនៃការបង្វិលដោយខ្លួនឯងដែរ។







